即時作業系統技術概覽
在一般計算環境裡,效能以吞吐量為主;但在工控、機器人與任務關鍵系統裡,決定成敗的是「可預期性」。
即時系統不一定「更快」,但它能保證在嚴格時限內回應。計算結果若晚了幾微秒,即視為失敗。
一般 Linux 的限制
| 問題 | 侷限 |
|---|---|
| 非決定性的排程 | 任務可能跑得快,但不一定準時 |
| 不可預期的中斷延遲/抖動 | 無法保證中斷延遲的上限 |
| 無 Worst-Case Latency | 無法定義最差回應時間 |
即時作業系統的價值
- 受控延遲:bounded latency
- 可預測排程:predictable scheduling
- 工控/機器人可用:可靠性 > 平均速度
在這類系統裡,最大風險不是效能不足,而是不可預期。我們透過 Kernel tuning、排程優化、IRQ 控制…建立決定性行為,讓工作在時限內完成。
衡量指標:Latency 與 Jitter
即時 OS 旨在降低 Worst-Case Latency,並縮小 Jitter(回應變異)。
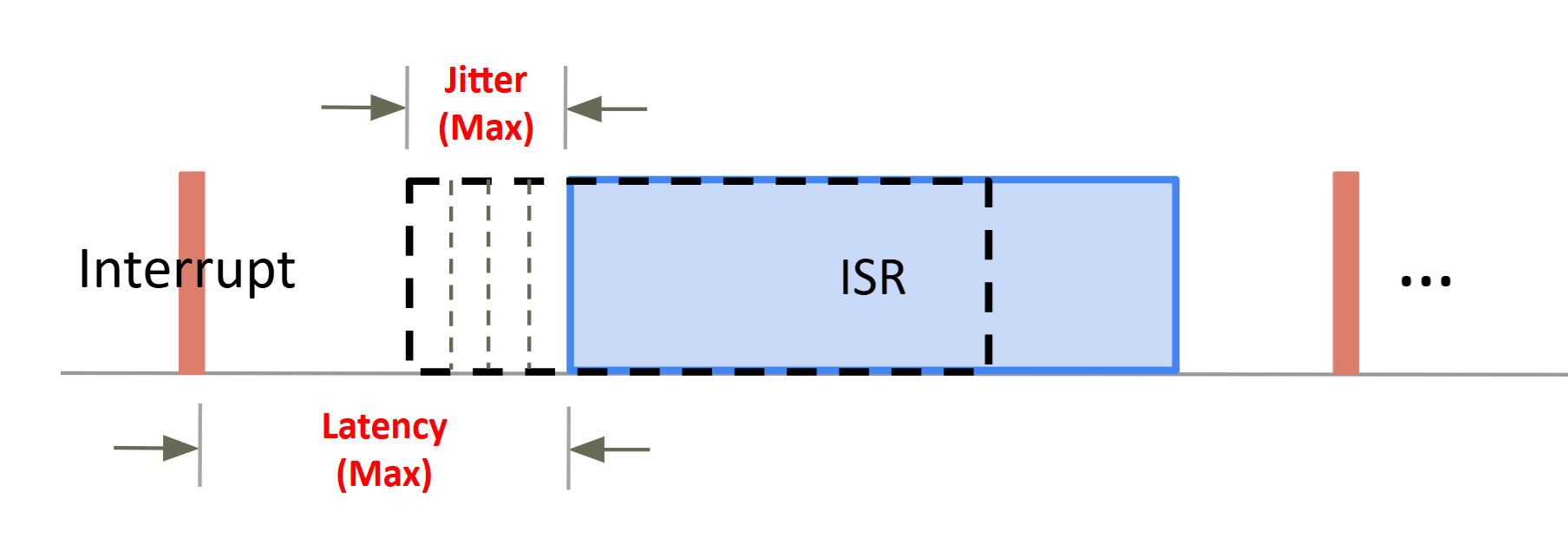
- Latency:事件發生到系統開始回應的時間。在標準 Kernel 中,低優先序任務可能長時間持有鎖,高優先序任務被迫等待。
- Jitter:連續任務回應時間的落差。標準 Kernel 可能此刻極快、下一刻極慢(例如遇到重量級系統呼叫)。
常見應用包含 EtherCAT 動作控制、AMR/AGV、機器手臂、工業 AI Edge、TSN 網路等。下表為不同場景的接受標準:
| 指標 | 一般自動化/醫療 | AMR / Robot Control | 進階動控 |
|---|---|---|---|
| 精度 | 低 | 中 | 高 |
| Max Latency | < 500 µs | 125–500 µs | 10–125 µs |
| 建議方案 | Preempt-RT | Preempt-RT | Xenomai (< 100 µs) 或高度調校的 Preempt-RT |
| 應用 | I/O、自動包裝、非生命維持設備 | 關節/運動控制 | 多軸伺服、CNC、Pick & Place |
即時作業系統分類
Preempt-RT
將 Linux Kernel 改造成近硬即時,大幅降低 Worst-Case Latency。
- 透過讓大部分鎖與中斷可被搶佔,縮短高優先權任務等待時間。
- 消除主要阻塞點,讓回應時間更一致,Jitter 更小。
Xenomai
採 Dual/Co-Kernel 架構,即時核心優先處理中斷並排程,即時任務完全繞過 Linux 排程器。
- 硬體事件由 Xenomai 先處理,延遲極低。
- 即時任務與一般 Linux 隔離,Jitter 幾乎消失。
應用案例
在高精度與安全關鍵領域,通用 OS 的最大問題就是不可預測。藉由 PREEMPT_RT、Xenomai 等技術,可讓 Ubuntu 具備決定性,保證工作在時限內完成。