SDK 與工具
預載 SoC 原廠 SDK 與 ROS2 工具,快速啟動各平台環境。
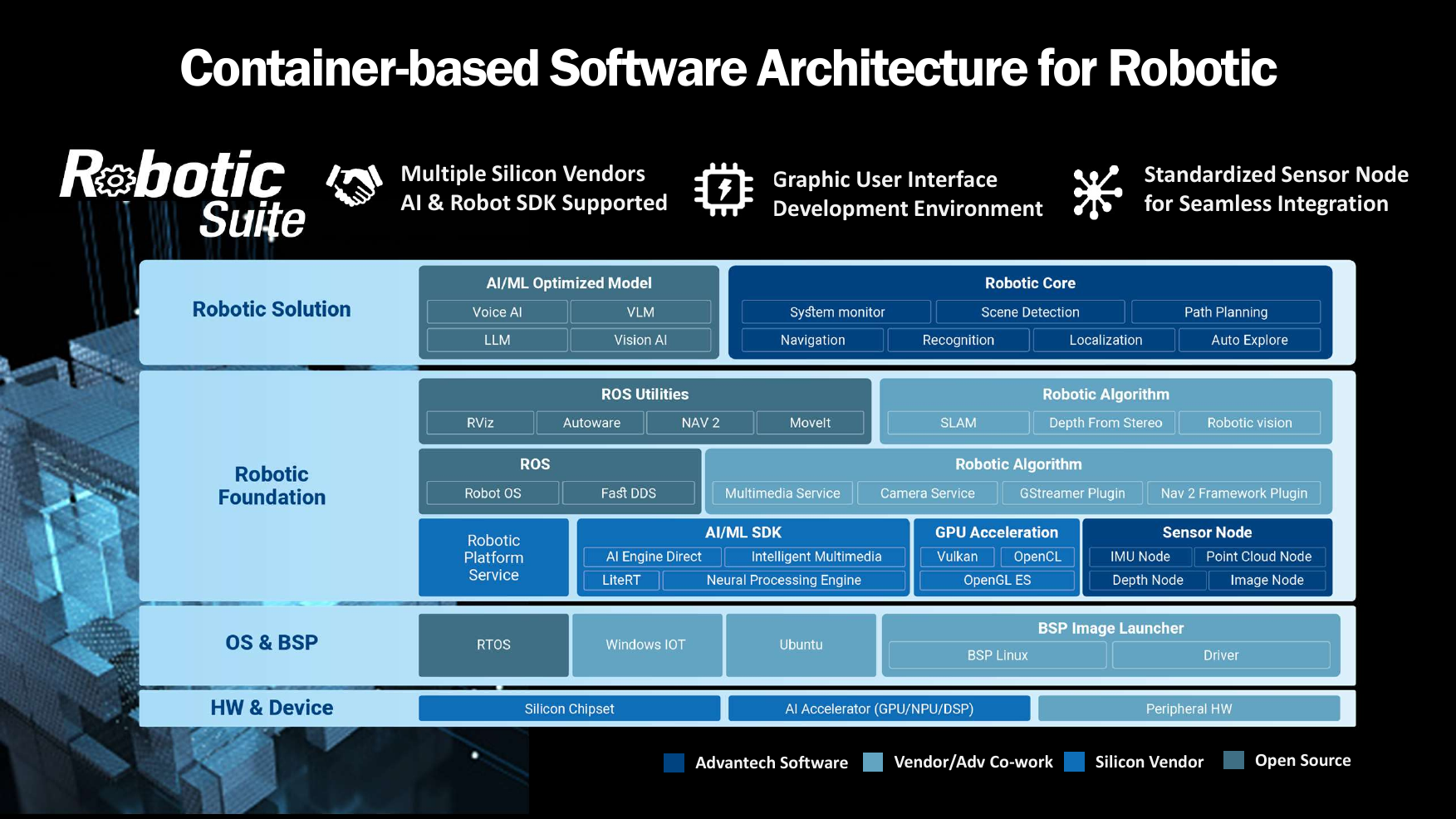
瞭解更多Advantech Robotic Suite
Advantech Robotic Suite 是一套整合的軟體環境,可加速機器人應用的開發、部署與管理,它不只是 SDK,而是一個完整的開發與執行生態系統。
Robotic Suite 為研華嵌入式 IPC(Intel x86_64、ARM NXP i.MX 8M、NVIDIA Jetson)提供一致的 ROS 2 體驗,會依 Ubuntu 版本自動安裝對應的 ROS 2 版號,並以容器化架構簡化開發、部署與感測器整合。
內建 SUSI、Modbus、OPC UA、ROS2 Database 與 DeviceOn 等容器化服務,開發者能快速在不同架構上建構 ROS 2 環境。
容器化架構可同時簡化 ROS2 的開發、部署與維運
按照建議路徑:ROS → 機器人基礎 → 移動機器人。