教學指南總覽
Advantech Robotic Suite 為機器人開發提供一條結構化的學習路徑,從核心 ROS 2 觀念、機器人系統流程,到實際應用與案例整合都涵蓋在內。
此頁是整個教學區的地圖,方便你快速找到 ROS 基礎、機器人觀念、行動平台實作與加值應用等內容。
ROS 2
Advantech Robotic Suite 內建 ROS 2 執行環境,並整合常用的開發與視覺化工具。
本章介紹最常用的 ROS 功能與工具,例如:
-
RViz(視覺化)
-
Domain ID(網路隔離)
-
rqt_graph(節點/Topic 關係)
-
Gazebo(模擬環境)
機器人基礎
本章說明機器人軟體流程的核心概念,也就是機器人如何取得資訊、做出判斷並執行動作。
-
感知(Sensing)
由各式感測器(LiDAR、相機、IMU…)蒐集原始資料。
-
洞察(Perception)
將感測資料轉為可用資訊,例如 SLAM、物件辨識。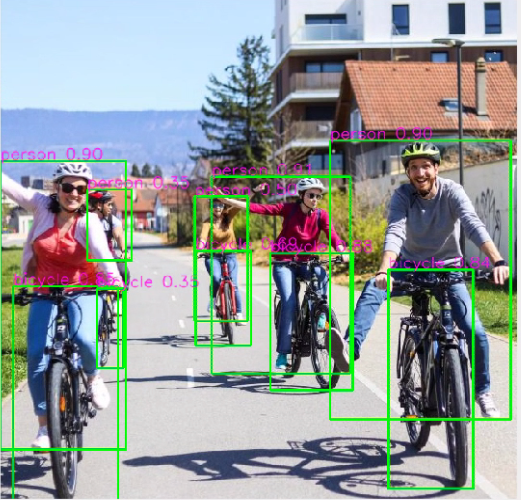
-
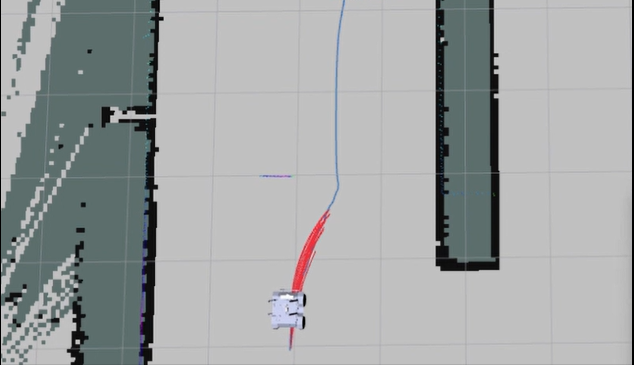
規畫(Planning)
根據感知結果產生決策與路徑(如 Nav2、路徑規畫)。
-
執行(Action)
將規畫結果執行到實體硬體(AMR、機械手臂、無人機…)。
四個階段串起完整流程:感知 → 感知運算 → 規畫 → 執行。
移動機器人
此章節著重於「實際機器人系統配置」,示範不同感測組合如何在真實環境中實現自主移動。
涵蓋主題包含:
-
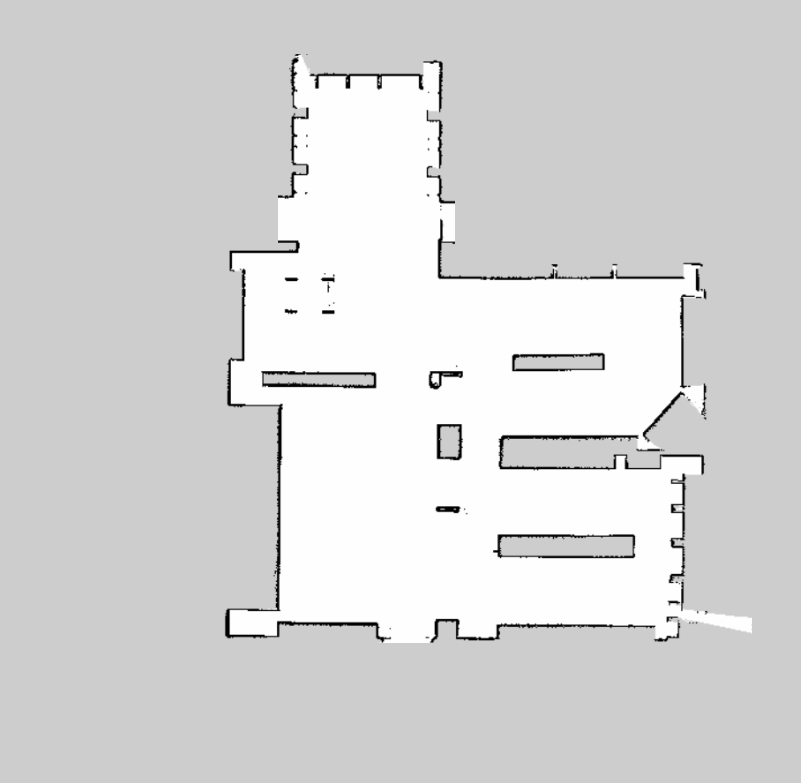
2D LiDAR 移動機器人
透過 2D LiDAR 進行建圖與導航,適合室內 AMR。 -
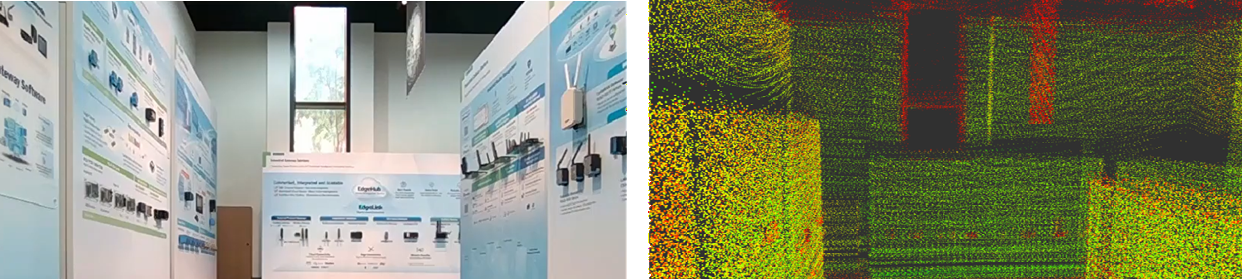
3D LiDAR 移動機器人
提供高度精準的 360° 環境感知。 -
3D Camera 移動機器人
利用深度相機(RGB-D/立體視覺)完成導航。 -
移動機器人視覺
多感測器融合與 AI 辨識,掌握更豐富的場域資訊。 -
Vendor Samples
預先整合的開發環境,能快速驗證概念與建立雛型。
簡單來說:Robotics 關注「機器人怎麼思考」,Mobility 關注「機器人如何感知與移動」。
SDK
Robotic Suite 以容器方式提供 SUSI、Modbus、OPC UA、ROS 2 Database 與 DeviceOn 等服務,方便快速整合工業協定與設備管理。
實例分享
以下以 ASR-A701DVK 開發套件為例,說明 Robotic Suite 的實際應用:
-
ASR-A701DVK 機器人開發實記
MakerPRO 的文章分享了 ASR-A701DVK 的開箱與入門過程,並示範如何利用 Robotic Suite(含 ROS 2 與範例專案)快速展開機器人開發。
👉 詳全文: 使用 ASR-A701DVK 開發 AI 機器人