洞察(Perception)
感知運算負責把原始感測資料轉為有意義的資訊,讓機器人可以理解周遭環境並進行決策。
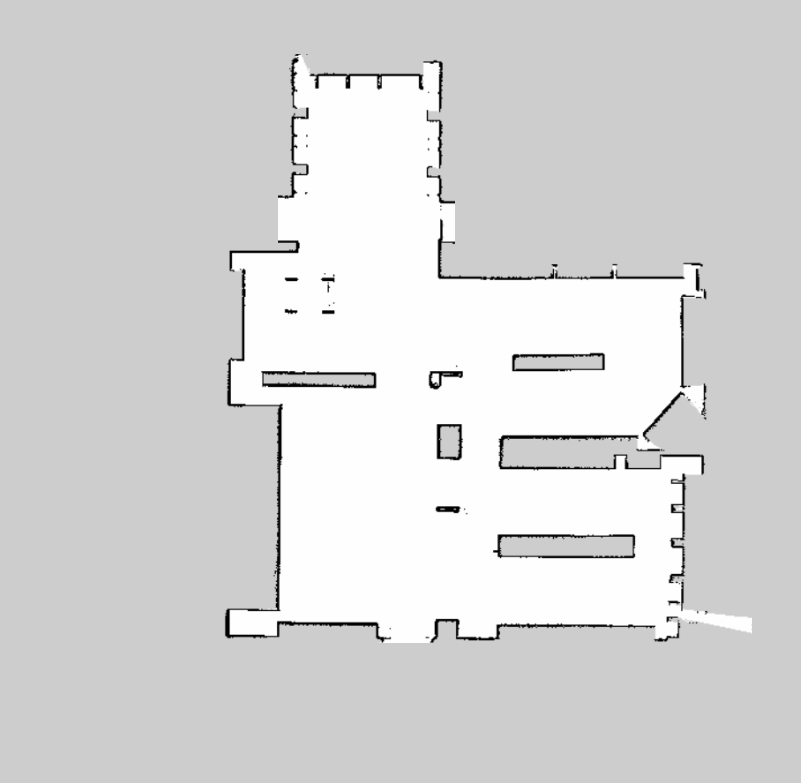
1. 建圖(Mapping)
- 目標: 邊移動邊建立環境地圖
- 輸入: LiDAR/相機資料
- 輸出:
- 2D 佔據格網圖
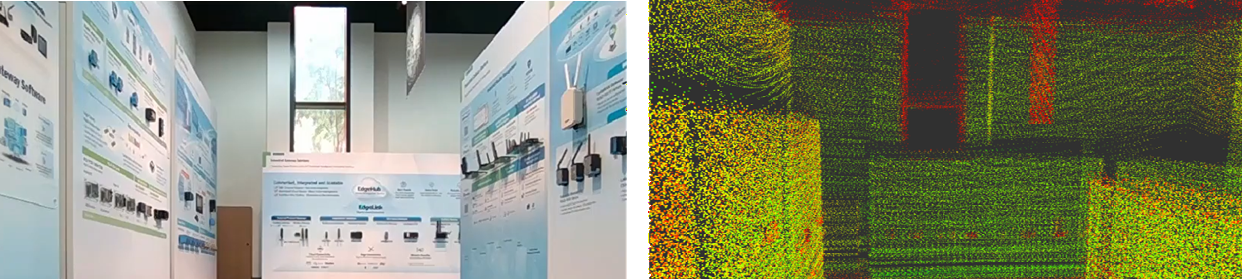
- 3D 點雲地圖
- 範例:
- 2D SLAM(例如 slam_toolbox)
- 3D SLAM(LiDAR / 視覺 SLAM)
- 2D SLAM(例如 slam_toolbox)
2. 定位(Localization)
- 目標: 推算機器人在環境中的位置與姿態
- 輸入: LiDAR/相機/IMU
- 輸出: 機器人姿態(x, y, z, roll, pitch, yaw)
- 常見方法:
- LiDAR 定位(NDT、AMCL)
- 視覺 SLAM(ORB-SLAM、Isaac ROS Visual SLAM)
- 感測融合(例如 IMU + LiDAR 的 EKF)
- ROS 2 Topic 範例:
/localization/pose/tf
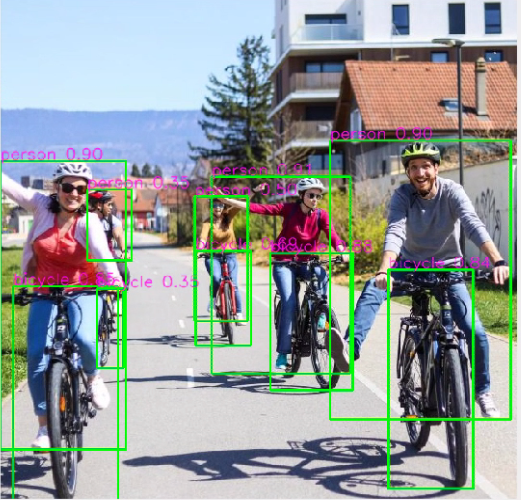
3. 物件偵測
-
目標: 找出並分類環境中的物件
-
輸入: 相機影像
-
輸出: Bounding box、類別標籤、信心值
-
範例:
- YOLO(如 Isaac ROS YOLOv8)可辨識人員、障礙物、棧板等
處理完的資訊會交給規畫(Planning)模組,產生具體行動。