機器人基礎
本章介紹機器人系統的關鍵概念,說明機器人如何感知環境、理解資訊並做出決策。
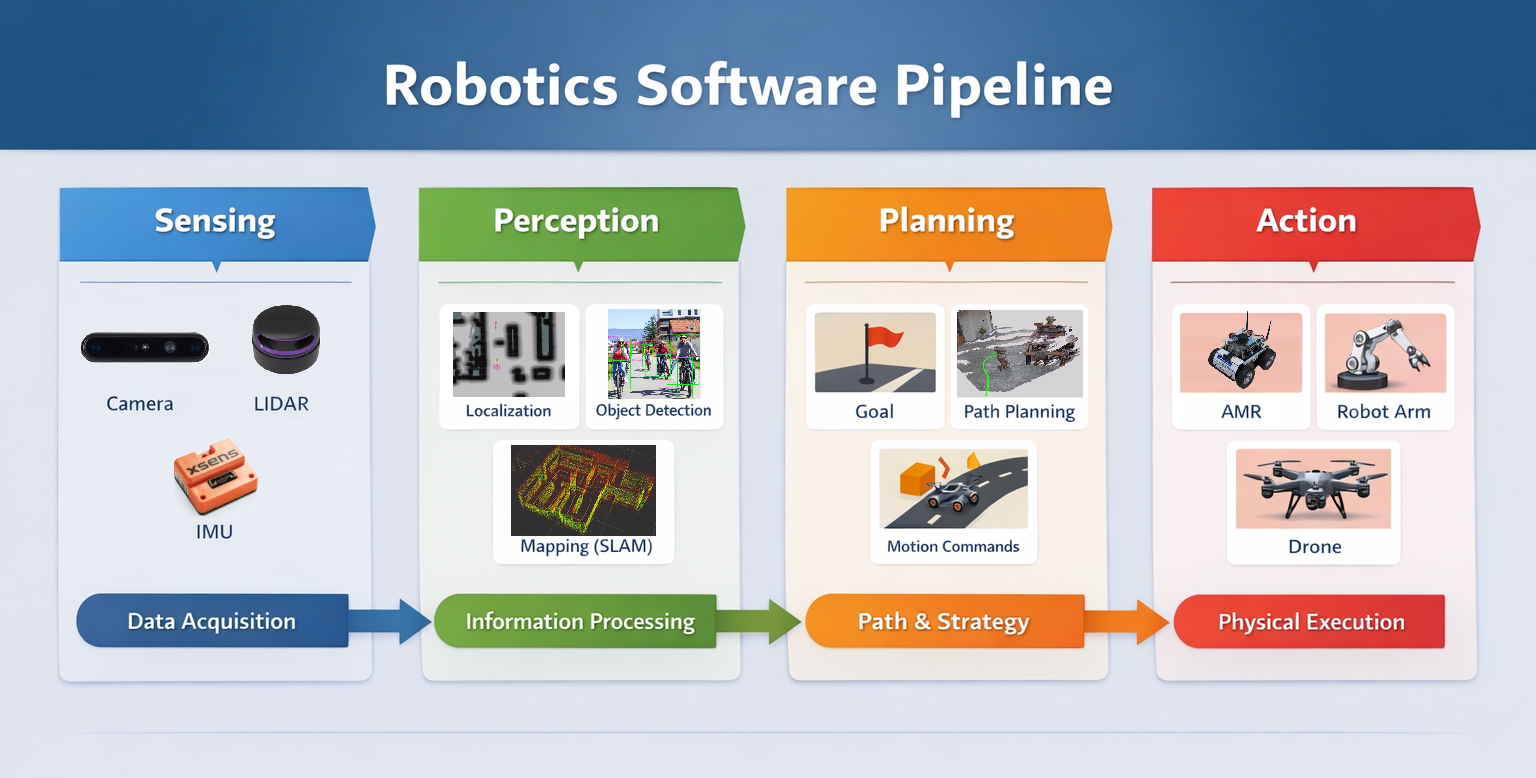
典型流程可分成四個階段:
-
感知(Sensing)
由 LiDAR、相機、IMU 等感測器取得原始資料 -
洞察(Perception)
將原始資料轉為地圖、定位、物件等有意義的資訊 -
規畫(Planning)
依據任務需求產生決策與移動策略 -
執行(Action)
把指令作用在實體硬體上
四個模組形成「感知 → 理解 → 決策 → 執行」的循環,是自主行為的核心。
你會學到什麼
- 機器人資料流程與各階段的角色
- 每個模組常用的演算法與工具
- 如何在 ROS 2 當中實作這些能力
掌握這些基礎,就能進一步打造真實世界的機器人應用。下一章〈移動機器人〉會示範如何把概念落地到完整系統。