ROS Sample Nodes
C++ sample
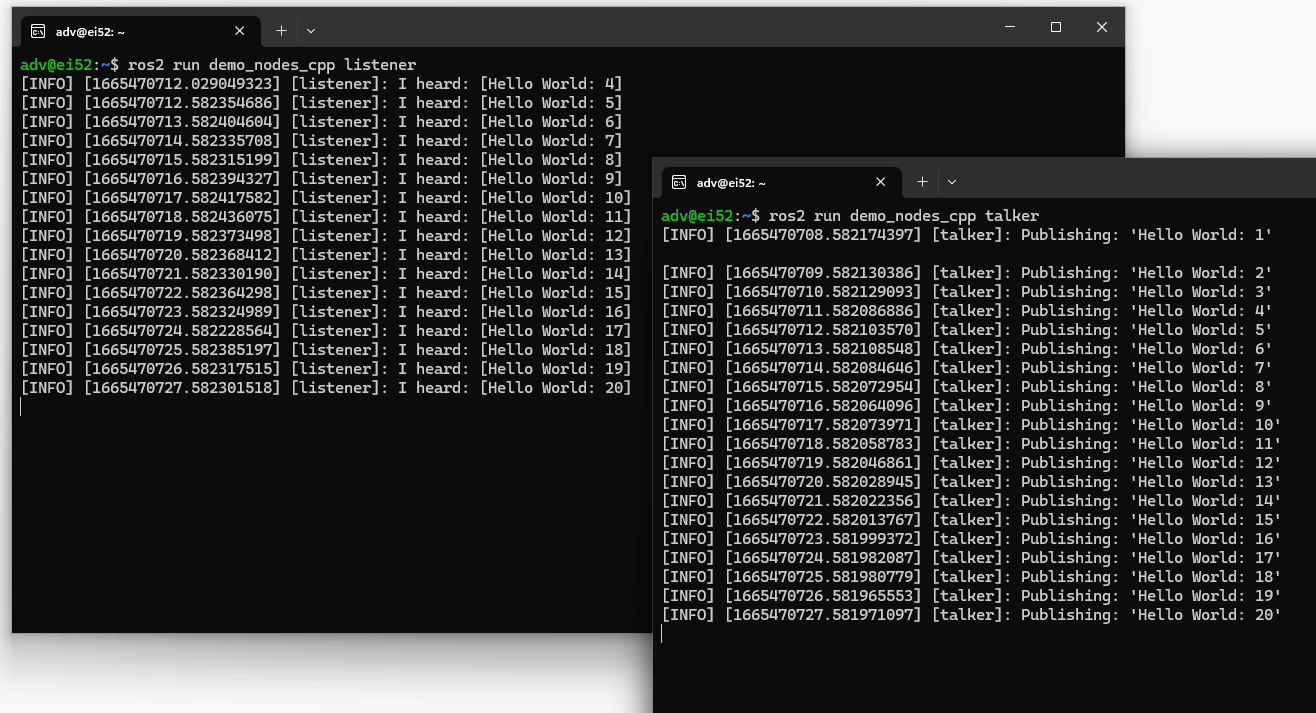
ros2 run demo_nodes_cpp listener
ros2 run demo_nodes_cpp talker
rclnodejs sample
cd /usr/local/Advantech/ros/${ROS_DISTRO}/sample_code/rclnodejs_sample
node sub.js # subscriber
node pub.js # publisher
(rclnodejs 0.21.4)
rclpy sample
cd /usr/local/Advantech/ros/${ROS_DISTRO}/sample_code/rclpy_sample
python3 subscriber.py
python3 publish.py
turtlesim
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
Use keyboard arrows to move/draw.


Note
On Ubuntu 24.04, run inside dev-ros2-foxy or dev-ros2-humble containers.