ROS 範例節點
C++ 範例
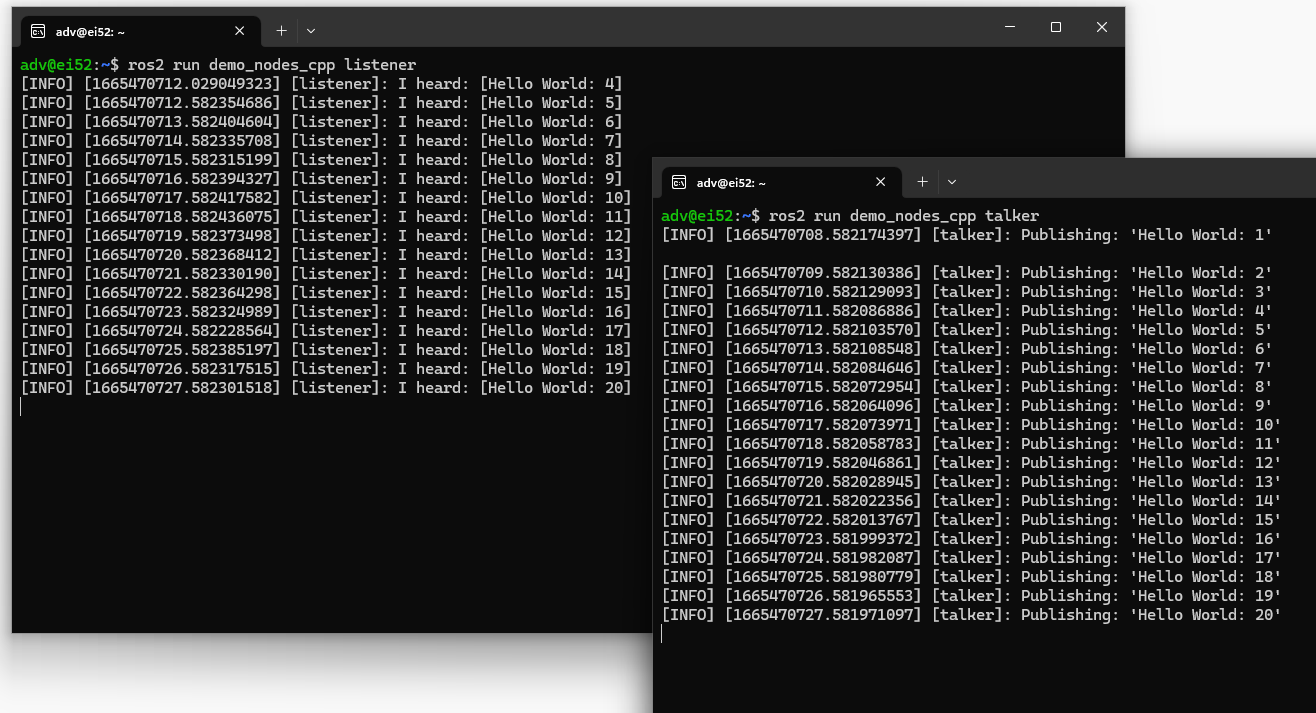
ros2 run demo_nodes_cpp listener
ros2 run demo_nodes_cpp talker
rclnodejs 範例
cd /usr/local/Advantech/ros/${ROS_DISTRO}/sample_code/rclnodejs_sample
node sub.js # subscriber
node pub.js # publisher
版本:rclnodejs 0.21.4
rclpy 範例
cd /usr/local/Advantech/ros/${ROS_DISTRO}/sample_code/rclpy_sample
python3 subscriber.py
python3 publish.py
turtlesim
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
開啟後可利用鍵盤方向鍵移動/繪圖。


注意事項
在 Ubuntu 24.04 上執行這些範例時,請進入 dev-ros2-foxy 或 dev-ros2-humble 容器。