Software Overview
This section provides access to installation guides, downloads, release notes, sample code, and real-time OS resources for Robotic Suite.
Example Demo
This section contains ready-to-run examples demonstrating common robotics workflows.
The examples are organized into two categories:
-
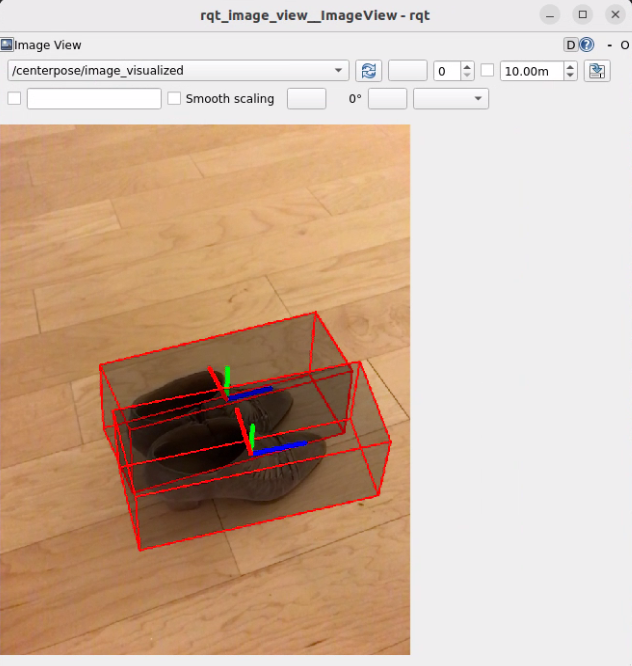
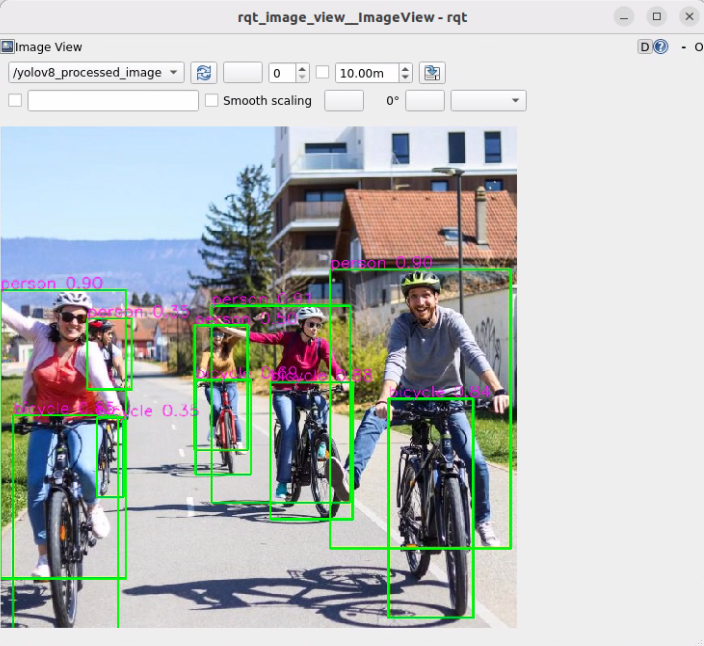
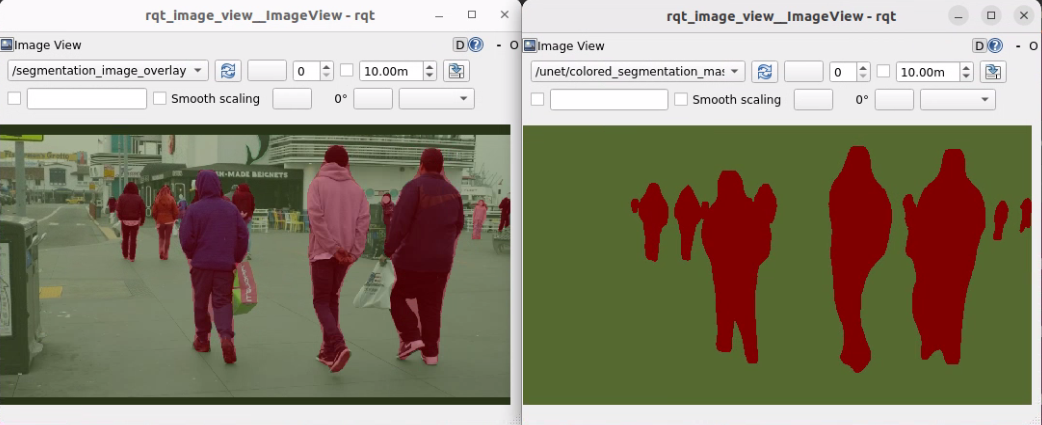
ISAAC ROS
GPU-accelerated perception and advanced workflows using NVIDIA Isaac ROS
-
ROS Base
Core ROS 2 examples covering mapping, localization, and navigation
These examples can be used for learning, evaluation, and as a starting point for development.
Development Environment
This section provides pre-configured environments for robotics development.
ISAAC ROS – Containerized environment for GPU-accelerated perception
Autoware – Containerized stack for autonomous driving workflows
These environments are designed to reduce setup effort and accelerate development.
Realtime OS
Ensure that critical tasks are completed on time within defined and predictable time constraints.