Multi-Sensor Function
此範例示範如何同時串流多組感測器資料並平行運行多個 ISAAC 功能。
安裝
NOTE
需為研華平台、剩餘空間 ≥ 3 GB、Ubuntu 英文介面並可連網。
- 按照安裝程式說明選擇並安裝 Multi Sensor Function,路徑:
/usr/local/Advantech/ros/container/ros-demokit/isaac_ros_kit。 - 執行:
$ ./launch_isaac.sh advanced_examples/isaac_ros_multi_sensor_demo
- 首次啟動會下載資源,完成後自動顯示 RViz 介面。
設定指南
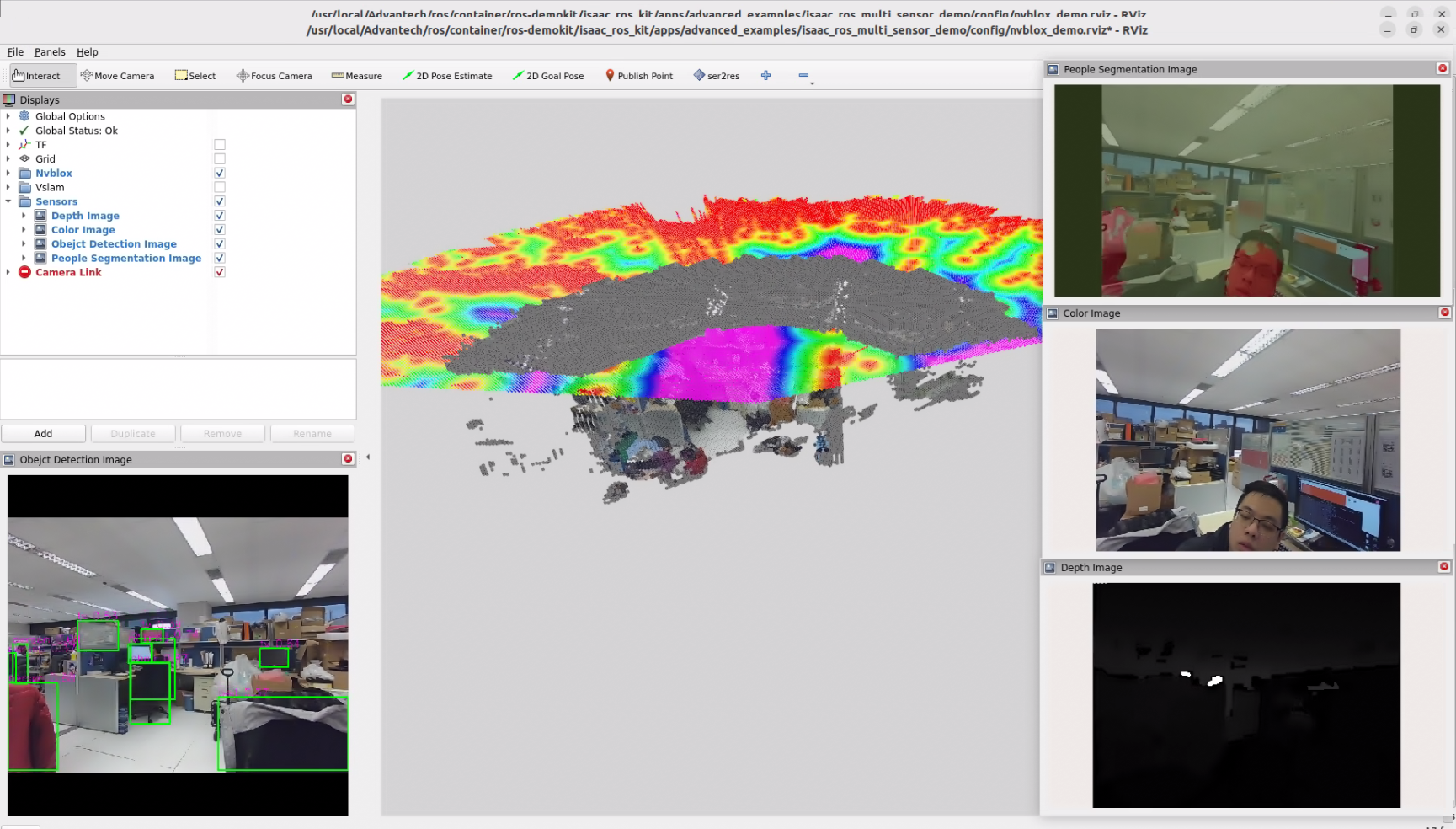
此範例以兩顆實體相機資料同時驅動 nvblox、yolov8、unet 等 ISAAC workload。RViz 版面:
- 左下: isaac_ros_yolov8
- 中央: isaac_ros_nvblox
- 右上: isaac_ros_unet
- 右側中間:RGB串流
- 右下角: Depth串流
啟動內容
執行 ./launch_isaac.sh advanced_examples/isaac_ros_multi_sensor_demo 後會:
- 播放含兩顆相機的 ROS bag(RGB、Depth、IR、camera_info、
/tf_static等) - visual_slam 取用 RGB-D + TF 估測姿態
- nvblox 利用姿態與深度建立 3D 重建
- yolov8 對 RGB 影像做偵測
- unet 平行進行語意分割
- RViz 將各輸出整合成儀表板
使用方式
- Camera 0:提供 RGB/Depth/IR,供 visual_slam、UNet、nvblox 使用
- Camera 1:額外 RGB 視角給 YOLOv8,維持推論品質
流程:
- 執行啟動腳本,容器會掛載、啟動 ROS bag 並啟動所有工作負載。
- 觀察 RViz:YOLOv8 在左下、nvblox 在中央、UNet 在右上,右側顯示 RGB/Depth。
若要套用到自家硬體,可用雙相機資料錄製相同 Topic 的 bag 取代預設檔案,即可沿用此 demo 作為校正、同步與 GPU 負載驗證。
適用情境
- 想以同一套感測器展示多個 ISAAC 能力,不需切換多個功能來進行展示
- 上線前驗證相機同步、TF 設定或啟動參數
- 希望同時比較偵測/分割/3D 重建輸出,便於調參或展示
GitHub
詳細的配置可以參考Robotic suite GitHub