3D Mapping With LiDAR
此範例示範在 AMR 上搭載 3D LiDAR,結合 lidarslam_ros2 建立 3D 地圖。
安裝
NOTE
需為研華平台、剩餘空間 ≥ 9 GB、Ubuntu 英文介面並可連網。
- 按照安裝程式說明選擇並安裝 3D Mapping with LiDAR 後,檔案位於
/usr/local/Advantech/ros/container/ros-demokit/3d-slam-ros2。 - 執行:
$ ./launch.sh humble
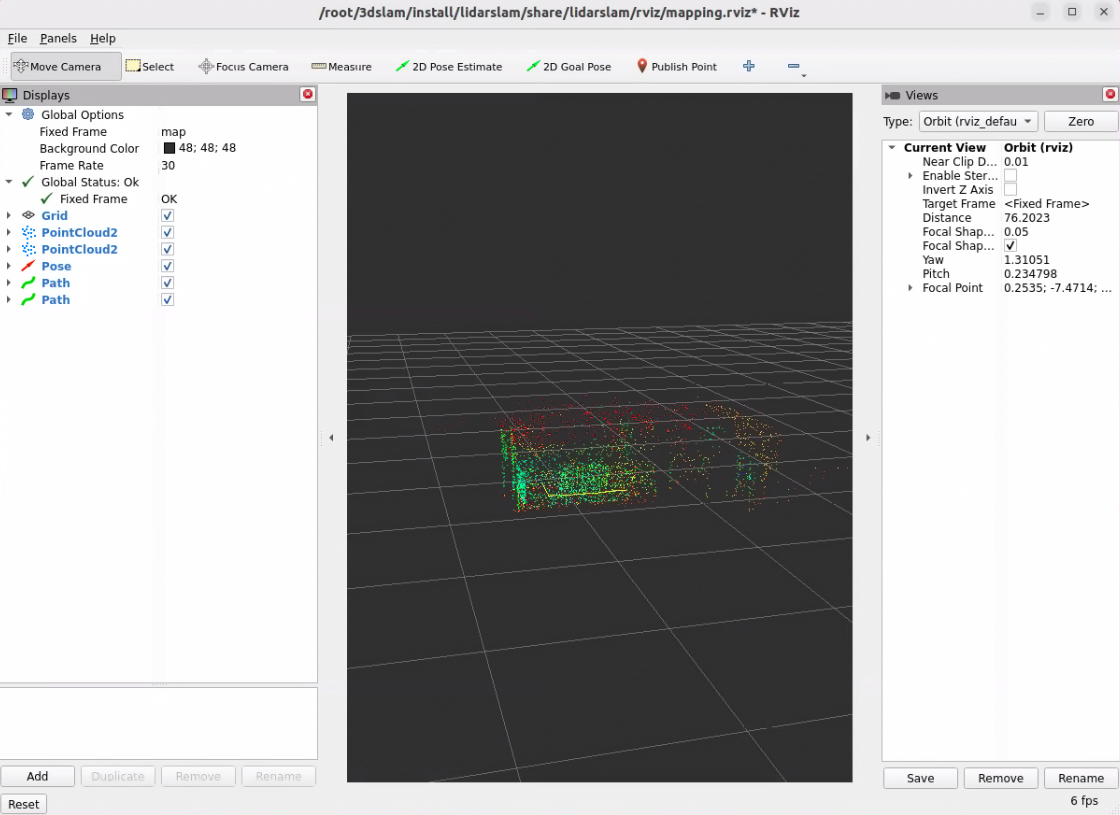
- 首次啟動會下載資源並自動顯示 RViz 畫面。
設定指南
流程包含:3D LiDAR、lidarslam_ros2、RViz。
啟動後包含:
- ROS bag 播放
/points、/tf、/odom等 Topic - lidarslam_ros2 節點訂閱資料、估測姿態並累積 3D 地圖(點雲)
- RViz 用來顯示點雲、軌跡與地圖
使用方式
研華環境未預裝 lidarslam_ros2,本範例容器已內建對應套件並自動啟動。
建立 3D 地圖所需:
- 3D LiDAR
- lidarslam_ros2
- 正確的 ROS 2 Topic:點雲(如
/points_raw)、/tf、/odom
範例內含 ROS bag,可在無硬體時重播觀察地圖生成。如需自家資料,可錄製同樣 Topic 的 bag 置換,沿用 ./launch.sh humble 驗證設定與調參。
詳盡參數請見 lidarslam_ros2 官方文件。
適用情境
- 初學 3D LiDAR SLAM,希望快速得到可用的 3D 建圖流程
- 手上有 3D LiDAR,想快速視覺化環境
- 需要後續導航/感知的 3D 基準地圖
流程重點:
- 啟動 lidarslam_ros2 + 3D LiDAR
- 在 RViz 觀察 3D 地圖逐步累積
- 儲存完成的地圖
可延伸:調整參數、加入 IMU/里程計融合、把地圖納入更大的導航或感知系統。
GitHub
詳細的配置可以參考Robotic suite GitHub