3D Camera Obstacle Avoidance
此範例示範在 AMR 上使用 3D 相機,結合 ISAAC Nvblox 與 Nav2 進行導航與避障。
安裝
NOTE
需為研華平台、剩餘空間 ≥ 3 GB、Ubuntu 英文介面並可連網。
- 按照安裝程式說明選擇並安裝 3D Camera Obstacle Avoidance,檔案位於
/usr/local/Advantech/ros/container/ros-demokit/isaac_ros_kit。 - 執行:
$ ./launch_isaac.sh advanced_examples/amr_demo
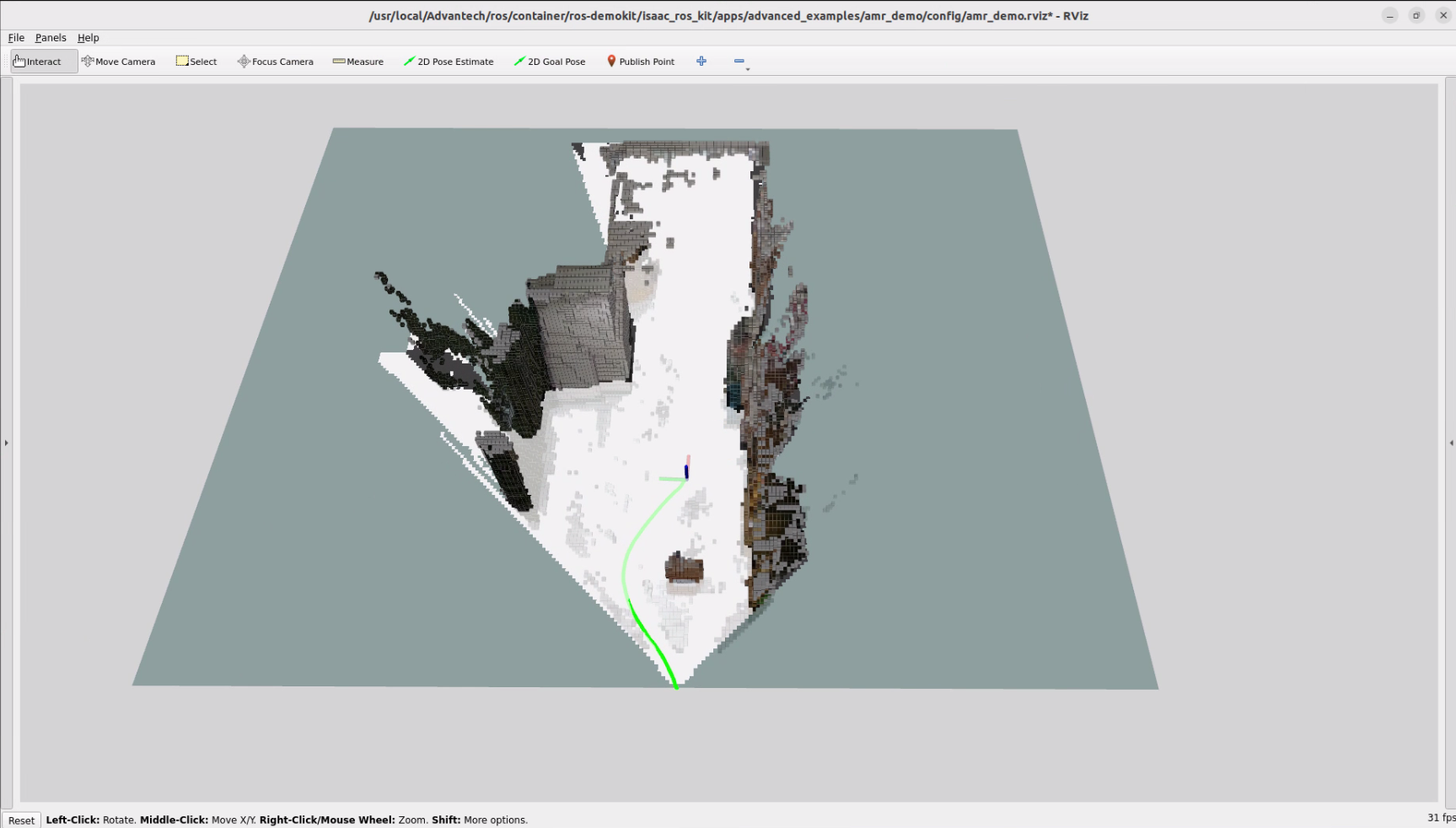
- 首次啟動會下載資源,完成後自動顯示 RViz 介面。
設定指南
流程組成:
- AMR 上的 3D 相機
- isaac_ros_nvblox 產生 costmap
- Nav2 導航堆疊
- RViz 視覺化與操作
此範例提供概念與設定參考,並非可直接部署於所有 AMR。
使用方式
因每台 AMR 硬體配置與環境皆不同,不要期待僅憑此範例即可在自家場域直接運行。建議用途:
- 觀察 Nvblox 與 Nav2 整合後的流程與視覺化結果
執行後:
- RViz 載入預設設定並顯示結果
- Nav2 依 Nvblox 提供的 costmap 規畫路徑
附帶的 ROS bag 僅包含關鍵 topic:
/camera_0/color/image:3D 相機彩色影像/nvblox_node/color_layer:Nvblox 色彩層/nvblox_node/combined_occupancy_grid:Nvblox 用於建圖/costmap 的佔據格/visual_slam/tracking/vo_path:視覺里程計估測的路徑
參考設定
建議先具備 ISAAC Nvblox 與 Nav2 的基本操作經驗。
範例中的關鍵調整:
- isaac_ros_nvblox:
mapping_type = dynamic - Nav2:
- YAML 中加入 Nvblox plugin(local/global costmap)
- 移除 AMCL 相關元件
此設定僅供參考,不代表 Nvblox 與 Nav2 只能如此整合。
GitHub
詳細的配置可以參考Robotic suite GitHub