2D LiDAR Navigation
此範例示範在 AMR 上搭配 2D LiDAR 與 Nav2 進行導航與避障。

安裝
NOTE
目標系統需符合:研華平台、剩餘空間 ≥ 3 GB、Ubuntu 英文介面、可連網。
- 按照安裝程式說明選擇並安裝 2D LiDAR Navigation,程式會放在
/usr/local/Advantech/ros/container/ros-demokit/2d-nav2-ros2。 - 進入資料夾並執行:
$ ./launch.sh humble
- 首次執行會下載所需檔案,完成後會自動開啟 Nav2/RViz 介面。
設定指南
此示範流程包含:
- 安裝在 AMR 上的 2D LiDAR
- 導航堆疊:Nav2
- 視覺化:RViz
目的在於協助你理解 Nav2 導航管線與主要元件,而非提供可直接套用於所有 AMR 的參數。
使用方式
Robotic Suite 主機環境已預裝 Nav2,無需額外安裝。
此範例使用預設的機器人模型與地圖,不會直接對應到你的實體 AMR;請將它視為概念與設定的參考。
透過範例你可以:
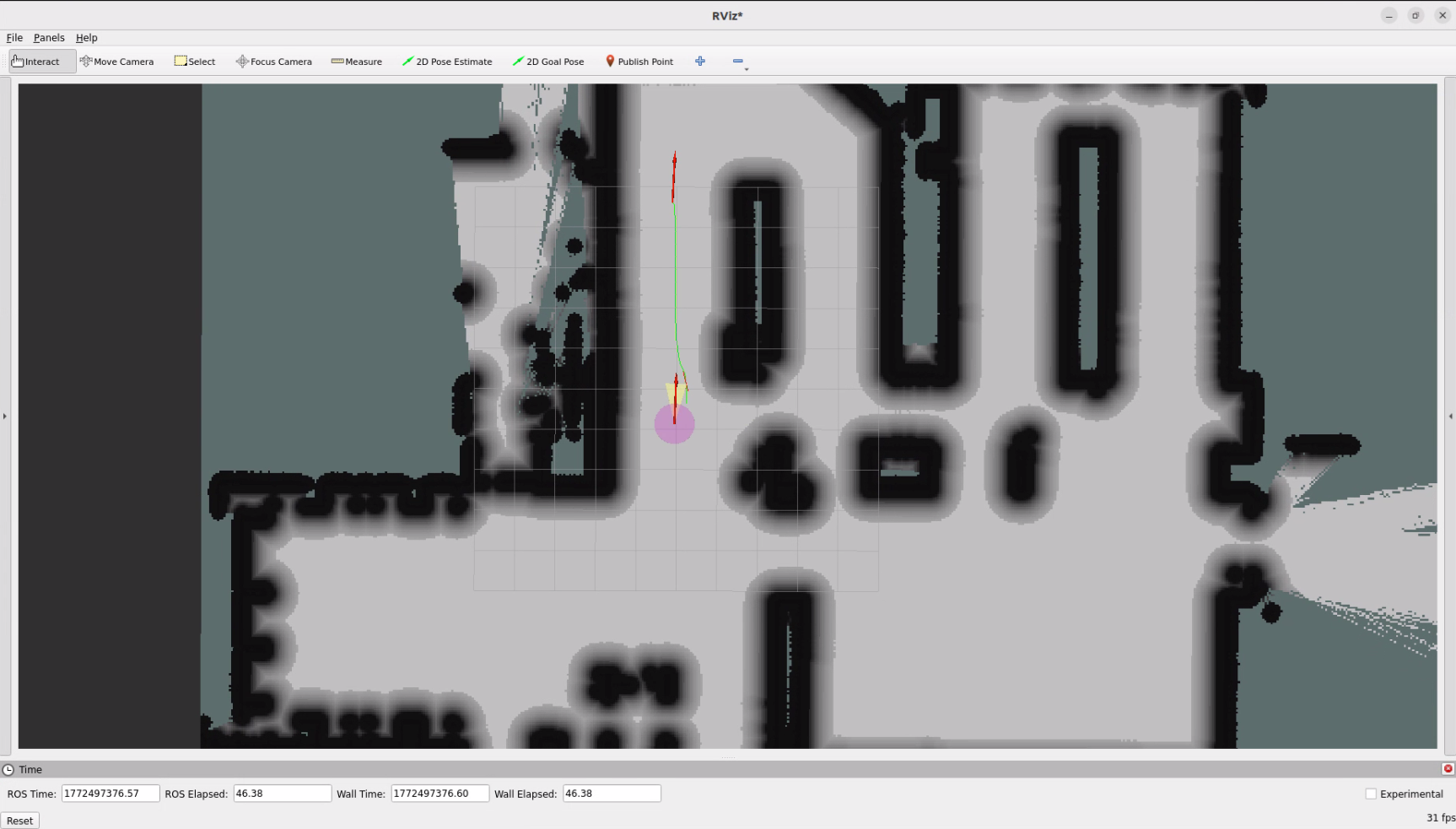
- 在 RViz 觀察 Nav2 的 bring-up:地圖、姿態、costmap、路徑等。
- 理解 Nav2 需要的 Topic/Frame,例如
/map、/scan、/tf、/odom、/cmd_vel。
當你啟動範例時:
- RViz 會載入範例地圖。
- Nav2 會根據範例配置計算全域路徑並模擬導航流程,你可在 RViz 看到規畫與避障。
若要套用到你的 AMR,需自行提供:
- Robot description、TF tree、感測器設定
- 與 Nav2 期望一致的 Topic/Frame 命名
- 依環境調整 costmap、planner、controller 等參數
欲深入調校,建議參考 Nav2 官方文件。
適用情境
- 初學 Nav2,想了解 2D LiDAR 導航流程
- 想看到完整的 Nav2 啟動與 RViz 設定
- 需要參考必備 Topic/Frame 以及 map server、定位、規畫、控制、BT 等元件
流程重點:
- 載入 2D 地圖並啟動 Nav2
- 透過 AMCL 等方法定位
- 在 RViz 送出導航目標
- 觀察 Nav2 計算路徑並使用 2D LiDAR 避障
接下來可以:
- 依自家 AMR 調整 Nav2 參數
- 使用「2D Mapping With LiDAR」產生的地圖
- 加入 IMU、編碼器等感測器以提升定位與導航品質
GitHub
詳細的配置可以參考Robotic suite GitHub