Autoware
本文件介紹 Autoware 開發容器,協助用戶在研華平台上快速執行 Autoware Universe,並在同一框架下打造自駕應用。
NOTE
首次執行範例時,系統可能會自動下載地圖、資料集與相依套件,視網路狀態可能需要較久時間。
TIP
預設環境版本
- Autoware:Universe v1.5.0
- ROS 2:Humble
1. Autoware 概覽
Autoware 是建構於 ROS 2 的開源自駕軟體堆疊,涵蓋感知、定位、規畫與控制等模組。Autoware Universe 為其 ROS 2 版本,由 Autoware 基金會和社群維護,可整合多種演算法以建立/驗證自駕流程。
典型模組包含:
- Sensing:感測器驅動與資料收集
- Perception:物件偵測、追蹤與環境理解
- Localization:透過 LiDAR、GNSS 或地圖估測車體姿態
- Planning:行為與軌跡規畫
- Control:輸出車輛控制命令
在具備 GPU 或高算力的邊緣平台上,Autoware 通常透過容器部署,以確保可重現性並精簡依賴管理。
2. 套件優勢
Autoware development container 提供容器化的 Autoware 開發環境,可快速驗證功能並在研華平台上開發自駕應用:
- 快速驗證:即時啟動 Autoware demo,檢查感知/定位/規畫流程。
- 一致的容器流程:方便團隊共享開發與測試環境。
- 降低建置成本:免去大型相依套件的手動安裝。
- 可擴充:容易整合自家資料集、感測器或演算法。
- 好維運:容器管理版本與更新更方便。
參考:https://autowarefoundation.github.io/autoware-documentation/
3. 安裝位置與結構
NOTE
請確認:研華平台、剩餘磁碟 ≥ 35 GB、Ubuntu 英文介面、可連網。
按照安裝程式說明選擇並安裝 Autoware Development Environment 後,套件位於:
- 根目錄:
/usr/local/Advantech/ros/container/ros-demokit/autoware_container - 初始化指令:
./launch.sh autoware_humble - 進入容器:
docker exec -it autoware_humble bash
4. 使用方式:進入開發環境
首次執行:launch.sh autoware_humble(下載/安裝依賴)
↓
每次開發:docker exec -it autoware_humble bash
↓
在容器內進行 Autoware 開發
快速體驗(Planning Simulation):
$ source /opt/ros/humble/setup.bash && source ~/autoware/install/setup.bash
$ ros2 launch autoware_launch planning_simulator.launch.xml \
map_path:=$HOME/autoware_map/sample-map-planning \
vehicle_model:=sample_vehicle \
sensor_model:=sample_sensor_kit
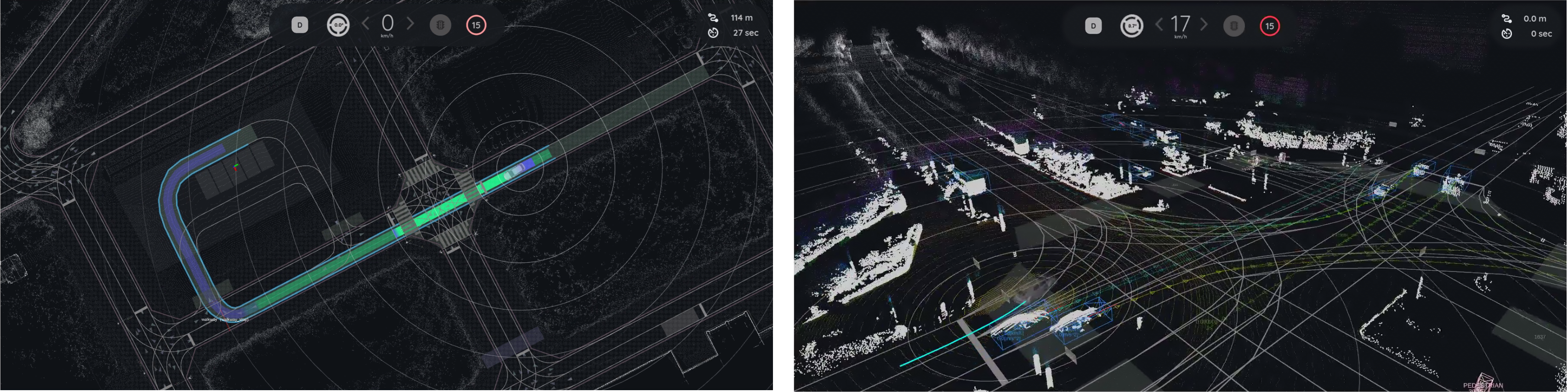
執行後會自動啟動 Autoware 規畫模擬:
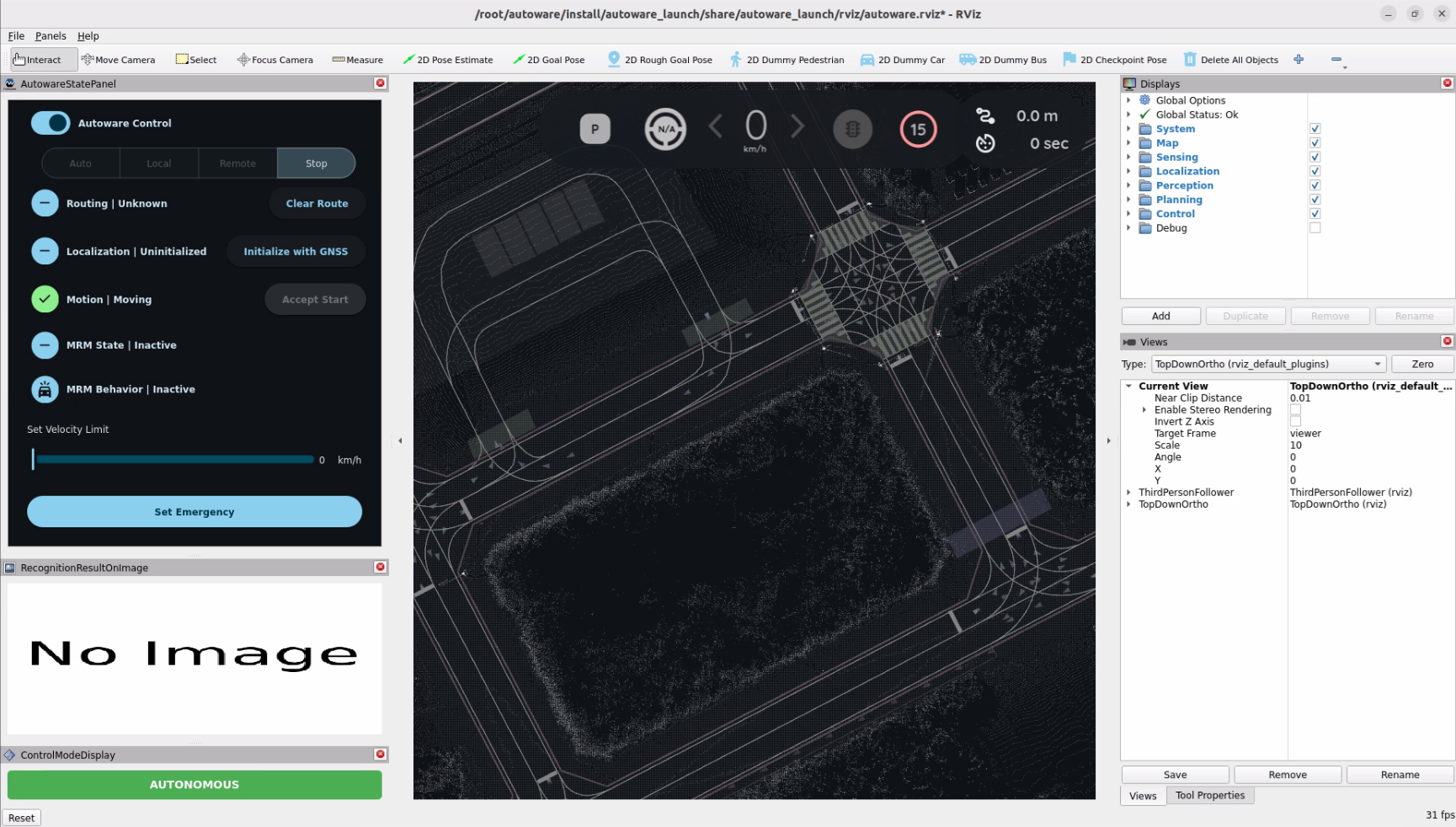
更多功能請參考 Autoware 官方文件。